14.04.2019
О степенях свободы в статистике. Если представить это в виде графической схемы, то это будет единственная линия с обязательными точками- событиями. И, как всегда - есть, был и будет - наш свободный выбор в этом вопросе: хотим- меняемся и изменяем свою жиз
Всё, что вы хотели об этом знать, но не знали, что вы этого хотите.
При разговоре о биомеханике человеческого тела часто возникает понятие степеней свободы. Например, без этого трудно обойтись, говоря об устройстве и классификации суставов. При этом способ подсчёта этих степеней свободы и получающиеся числа часто остаются в некотором тумане. Эта статья для тех, кто чувствовал некоторую неудовлетворённость и отсутствие ясности после таких разговоров.
Сначала объясним на пальцах.
На пальцах
Если мы сравним паровоз, идущий по рельсам, и пароход, плывущий по морю, то чем отличается их движение? Паровоз может ехать только по рельсам. Он никуда с них не свернёт. Может только дать задний ход.
Пароход, в отличие от него, свободен плыть в любую сторону. Особенно если вокруг него бескрайний океан. Паровоз едет только по линии, а пароход - уже по плоскости. (Ну, ладно - по поверхности сферы. А точнее - геоида.) Пока скажем - нестрого и не очень правильно с точки зрения принятой терминологии, - что степень свободы парохода явно больше, чем паровоза.
А теперь возьмём самолёт. У него степень свободы оказывается ещё больше. Он уже может подняться в воздух. Он может попасть в любую точку пространства. Если, конечно, ему разрешит диспетчерская служба.
Это мы пока смотрели только на перемещения всех этих машин, или, как обычно говорят физики, - тел. Но ведь есть ещё и повороты. Паровоз не может ни задрать нос (подъём), ни наклониться в сторону (наклон), ни встать боком поперёк рельсов (поворот). Да, если рельсовый путь делает поворот, то паровоз повернёт вместе с рельсами. Но не сам. Поэтому такие повороты не считаются. Они не увеличивают степень свободы паровоза.
Пароход уже может сделать поворот. Пусть море пока будет спокойным и гладким как стекло, чтобы его легче было считать плоскостью. Тогда подъём пароходу недоступен так же как паровозу. Наклонить пароход набок, наверно, трудновато. Но если мы возьмём небольшую парусную яхту, то наклонить её, похоже, нет проблем. Судя по фотографиям, они большей частью так и плавают: перекосившись на сторону, с экипажем, висящим за бортом и чиркающим попами по гребням волн.
А вот самолёт может всё: и поднимать/опускать нос, и наклоняться в сторону, и поворачивать. Особенно если им управляет ас из отряда «Русские витязи». Они даже хвостом вперёд летают. И вверх тормашками. Что, правда, уже не увеличивает степень свободы самолёта - она и так максимальная.
Для контраста и для общности вообразим себе механизм с нулевой степенью свободы. Просто он никуда не едет: сломался. И с толкача завести не удалось.
Теперь постепенно начнём наводить научную строгость.
Одна степень свободы
Сразу же начнём выражаться более правильно. Будем говорить: «степени свободы», во множественном числе. Их может быть нуль, одна, две и так далее. Это просто число. Натуральное, т. е. целое положительное. Теперь нужно понять, как же их считают.
Вернёмся опять к началу - к паровозу. Пусть нам надо знать, как точно задать его положение на прямолинейном участке пути около станции. Свернуть он никуда не может. На другой путь тоже не может перейти: все стрелки мы предусмотрительно переключили так, чтобы он никуда не делся. Всё, что он может, это проехать несколько сотен метров в ту или обратную сторону. Как мы зададим его положение? Да просто расстоянием от какой-то точки на пути. Например, от точки, которая находится прямо напротив входа на станцию. Если паровоз проехал 100 метров от станции в сторону Санкт-Петербурга, то нам достаточно одного числа 100 м, чтобы знать, где он сейчас. А если он проехал те же 100 метров в сторону Москвы? Это же другой случай. Тогда мы напишем отрицательное число: –100 м. И снова будем точно знать, где паровоз.
Рис. 1. Паровоз на прямолинейном участке рельсов.
Итак, что мы получили? Чтобы в нашей ситуации знать точное расположение паровоза, нам нужно только одно число. Вот это и значит, что у паровоза - в рамках придуманной нами ситуации - одна степень свободы. А само это число будет называться координатой паровоза. Единственной координатой, которую нам нужно знать. Или которую нам нужно сказать машинисту, чтобы он знал, куда ему отогнать паровоз.
Пусть теперь у нас будет не прямой рельсовый путь, а извилистый. Что-нибудь это меняет? Ничего, пока паровоз никуда не может деться с этого пути. Мы точно так же можем мерить расстояние вдоль рельсов и точно так же можем задать положение паровоза одним числом - расстоянием от станции. У него по-прежнему остаётся только одна координата, только одна степень свободы.
Мы можем придумать для него и другую систему координат. Пусть это будет не настоящий паровоз, а игрушечный, который бегает по кругу. В этом случае мы по-прежнему можем в качестве координаты взять расстояние от игрушечной станции. 20 см - паровозик отъехал по часовой стрелке. –20 см - а это против часовой стрелки.

Рис. 2. Паровоз на рельсовом кругу. Координата - расстояние.
Но раз у нас круг - точнее, окружность, - то нам может показаться удобнее задавать положение паровозика углом. Отмечаем центр окружности, кладём туда транспортир и меряем угол между направлением на станцию - это будет нуль - и направлением на паровозик. Вот он проехал 90° по часовой стрелке - считаем, что его координата 90°. А вот он проехал 90° против часовой стрелки - тогда его координата будет –90°.

Рис. 3. Паровоз на рельсовом кругу. Координата - угол.
Но нам по-прежнему нужна только одна координата. Мы перешли от расстояний к углам, но ничего не изменилось. У паровозика по-прежнему одна степень свободы.
Сделаем даже так. Раз мы всё время поминаем часовую стрелку, то и воспользуемся часами. Положим их в центр круга и будем отмечать положение паровозика минутами на циферблате. Или часами - это менее точно, но удобно. Паровозик на 3 часа или на 9 часов - что может быть проще? И снова у него только одна координата. И одна степень свободы.

Рис. 4. Паровоз на рельсовом кругу. Координата - часы на циферблате.
Обобщим: если тело может двигаться только вдоль одной линии, сколь угодно кривой, оно имеет одну степень свободы. Но это, если мы говорим только о местонахождении тела и не учитываем его повороты, наклоны и подъёмы. Почему не учитываем? Может быть, нам это неважно. А может быть, оно и не может никуда деться, как паровоз на рельсах.
Две степени свободы
Так, а что у нас с пароходом, который плавает по морю? Сколько координат нам нужно в этом случае? Можно поглядеть на навигатор GPS и увидеть: две координаты. Долгота и широта. Как они там считаются, нам уже не важно. До тех пор, пока нас не интересует, куда пароход повернулся носом, а интересует только, в какой точке моря он находится, нам достаточно двух координат, которые нам выдаёт система GPS.

Рис. 5. Пароход в море. Координаты: широта и долгота.
Мы можем придумать и свою систему координат. Пусть, например, пароход плавает только в зоне видимости, а у нас есть компас и дальномер. Тогда мы в качестве координат можем взять направление на пароход (угол, определяемый по компасу) и расстояние до него (по дальномеру) от маяка, на башню которого мы взобрались и который назначили началом координат. В математике такую систему координат называют полярной.

Рис. 6. Пароход в полярных координатах.
И снова мы получаем две координаты. И две степени свободы для парохода. И снова замечание: мы при этом интересуемся только положением парохода в море. И не интересуемся, куда он при этом повернулся носом и как наклонился.
А если у нас не корабль по морю идёт, а пеший турист по горам? Неважно, у туриста тоже есть навигатор и он видит на нём те же две координаты. Т. е. поверхность не обязана быть плоской.
Обобщим: если тело может двигаться только по какой-то поверхности, пусть даже не плоской, оно имеет две степени свободы. Конечно, если мы не интересуемся его поворотами и наклонами.
Три степени свободы
Теперь уже несложно разобраться и с самолётом. Кроме двух координат, которые нам даст навигатор, нам понадобится ещё высота полёта, которую мы определим альтиметром. (Система GPS тоже вычисляет высоту, но довольно приблизительно.) Получаем три координаты и, соответственно, три степени свободы.
Для самолёта мы тоже можем ввести полярные координаты, только чуть сложнее. Нам понадобятся два угла: направление на самолёт по горизонтали (компас), направление на самолёт по вертикали (какой-то угломер), а также одно расстояние - от нас до самолёта (дальномер). И мы снова получим три координаты.

Рис. 7. Самолёт в полярных координатах.
Обобщим: если тело может двигаться куда угодно в трёхмерном пространстве, оно имеет три степени свободы. Опять же, если нас не интересует, как оно при этом повернулось и куда наклонилось.
А если интересует?
Подъём, наклон, поворот
Не будем уже возвращаться к паровозу, останемся с самолётом, рассмотрим самый сложный случай.
Если нам важно, не только, где самолёт сейчас летит, но и как он расположен в воздухе (я думаю, пилоту это важно), то нам оказывается мало уже имеющихся трёх координат.
Самолёт может задрать или опустить нос - будем это называть подъёмом. Может наклониться направо или налево - это так и назовём наклоном. И может повернуться направо или налево - это будет поворот. Получаем три угла - три новые координаты. Всего координат оказывается шесть. И шесть степеней свободы у нашего самолёта.

Рис. 8. Угловые координаты самолёта: подъём, наклон и поворот. На картинке с поворотом - вид сверху.
Обобщаем: тело в пространстве имеет шесть степеней свободы. И шесть координат: три пространственные и три угловые.
С пароходом и паровозом вы уже можете, наверно, разобраться сами.
Нужно, правда, сделать одно важное замечание.
Так три или шесть?
Получается, что количество степеней свободы какого-либо тела - это не его неизменное свойство. Это условная величина, которая зависит от того, что нам нужно знать, от условий нашей задачи. Вы сами видите: сначала мы насчитали у самолёта три степени свободы, а, изменив условия задачи, - все шесть. И тот, и другой ответ правильный. Но для разных вопросов.
Вы вот, например, уверены, что дважды два всегда четыре? Умножим 2 метра - длину квадратной комнаты - на 2 метра - её же ширину. Получаем 4 квадратных метра - площадь комнаты. Любой риэлтор с этим согласится. Возьмём теперь 2 метра стальной трубы и умножим на другие 2 метра такой же трубы. И где вы видите получившиеся 4 квадратных метра? Их не существует в природе. Вычисление было явно бессмысленным.
Проверим сложение. Один плюс один будет два. Возьмём один литр спирта и один литр воды и смешаем. Химия уверяет нас, что мы никак не получим 2 литра разбавленного спирта. Свойства спирта и воды таковы, что объём (именно объём, а не масса!) раствора будет всегда меньше, чем сумма исходных объёмов. Аналогично, смешав стакан воды и стакан соли, мы не получим два стакана рассола. Химия обманет нас и на этот раз.
Даже арифметика может ошибаться. Если ей пользоваться бездумно.
Для коллекции - нуль степеней свободы
Нуль - это понятно без слов. Сломанный механизм, который никуда не едет и который с места не свернёшь. Не нужно никаких координат - и так ясно, где он стоит. Нуль степеней свободы.
Ближе к телу
Теперь будем двигаться в сторону биомеханики. Поговорим о механизмах.
Те механизмы, о которых мы до сих пор говорили - паровозы, самолёты - мы вообще-то рассматривали не как механизмы, а как просто тела. Нам неважно было их внутреннее устройство. Теперь займёмся устройством механизмов. Но гораздо более простых.
Будем рассматривать механические системы, состоящие из твёрдых, нерастяжимых и негнущихся звеньев, соединённых шарнирами. Шарниры для начала рассмотрим двух типов: цилиндрические и шаровые.
Цилиндрический шарнир, или шарнирная петля, это соединение двух звеньев, которое позволяет им вращаться вокруг общей оси. Или, если мы считаем одно звено неподвижно закреплённым - неподвижной опорой, - то этот шарнир позволяет второму звену вращаться вокруг оси шарнира.

Рис. 9. Цилиндрический шарнир: с двумя свободными звеньями и с одним закреплённым звеном - опорой.
Где мы можем найти такое соединение в человеческом теле? Это, например, локтевой сустав. Межфаланговые суставы пальцев. Коленный сустав, в первом приближении, тоже подходит, хотя с ним всё несколько сложнее: тут реальная биомеханика сильно отходит от абстрактного механизма.

Рис. 10. Локтевой сустав (распил). (По Синельникову.)
Второй тип шарнира - это шаровой шарнир, где звенья вращаются вокруг общей точки. Опять же, можно считать одно звено неподвижной опорой, тогда второе звено может вращаться вокруг некоторой точки этого шарнира. Точки, а не оси.

Рис. 11. Шаровой шарнир: с двумя свободными звеньями и с одним закреплённым звеном - опорой.
Какие суставы в нашем теле подходят под эту модель? Плечевой и тазобедренный.

Рис. 12. Плечевой сустав (распил). (По Синельникову.)

Рис. 13. Тазобедренный сустав (распил). (По Синельникову.)
Шарниры и степени свободы
Возьмём цилиндрический шарнир с одним закреплённым звеном. На рисунке закреплённое звено изображено просто как неподвижная опора. Свободное звено может двигаться только одним образом: поворачиваться вокруг оси шарнира, оставаясь при этом в одной плоскости. Его незакреплённый конец двигается при этом только по одной линии - дуге окружности с центром на оси шарнира.
В нашем теле аналогом будет, например, локтевой сустав. Нам нужно только зафиксировать плечевую кость. Для этого просто обопрёмся локтем о стол и постараемся не двигать плечом.
Как мы можем задать положение свободного звена? Сколько координат нам для этого надо? Поскольку мы можем только повернуть его вокруг оси, то нам достаточно задать угол поворота. Это и будет единственная координата, которая нам нужна. Для локтевого сустава - то же самое.

Рис. 14. Цилиндрический шарнир и его возможные движения.
Получается, что как цилиндрический шарнир, так и локтевой сустав имеют одну степень свободы.
Теперь рассмотрим шаровой шарнир и его аналог - плечевой сустав. Снова закрепим одно звено шарнира. Чтобы закрепить звено плечевого сустава, нам достаточно постараться не двигать лопаткой.
Шаровой шарнир допускает уже гораздо больше различных движений. Свободное звено может качаться в нём во все стороны. К тому же оно может поворачиваться вокруг собственной продольной оси, оставаясь на месте. Всё то же самое умеет делать и наше плечо. Незакреплённый конец свободного звена двигается при этом уже не по линии, а по участку сферы с центром в шарнире.
Для того, чтобы однозначно задать положение звена, нам потребуются три угла. Два из них задают наклон звена в пространстве, а третий - поворот звена вокруг собственной оси. Получаем три координаты и три степени свободы для шарового шарнира и плечевого сустава.

Рис. 15. Шаровой шарнир и его возможные движения.
Одна, три... А где же две?
Вы, может быть, заметили, что, разговаривая о шарнирах, мы перескочили от одной степени свободы сразу к трём. А есть ли шарниры, имеющие две степени свободы? Простого шарнира нет, но есть механизм, состоящий фактически уже из трёх звеньев: карданная передача. Её свободный конец может так же, как в шаровом шарнире, наклоняться в любую сторону, но не может провернуться вокруг собственной продольной оси. На этом как раз и основано использование карданов в автомобилях с задним приводом.

Рис. 16. Карданная передача.
В человеческом теле карданных передач, конечно, нет, но суставы с двумя степенями свободы встречаются. Это, например, лучезапястный сустав. Зафиксировав предплечье, мы можем наклонять кисть как угодно, но не можем повернуть её вокруг продольной оси. Если вы, проверяя это, всё-таки смогли повернуть кисть, это значит, что вы недостаточно зафиксировали предплечье и использовали его подвижность. Крепко возьмите себя чуть выше запястья другой рукой, не давайте поворачиваться предплечью, и вы убедитесь, что кисть не поворачивается. У этого сустава только две степени свободы.
Человеческие суставы вообще устроены гораздо сложнее, чем простые шарниры. Приведём ещё пару примеров суставов, не подходящих под простейшие механические схемы.
Древо жизни
Кажется, что коленный сустав вполне подходит под схему цилиндрического шарнира. Если мы зафиксируем бедро - например, сядем на стол, свесив ноги, - то колено будет качаться, рисуя дугу, так же, как свободное звено шарнира. Но, на самом деле, при согнутом колене голень может ещё и немного поворачиваться вокруг своей продольной оси, добавляя коленному суставу ещё одну степень свободы. Когда мы сгибаем колено, ослабляется натяжение некоторых связок коленного сустава, крепление голени становится более свободным и появляется возможность поворота, которой нет, когда колено выпрямлено. Получается, что коленный сустав имеет одну степень свободы при почти выпрямленном колене и две при согнутом.

Рис. 17. Возможные движения в коленном суставе.
Локтевой сустав мы тоже приводили как пример цилиндрического шарнира. И он действительно подходит под эту схему, если мы будем рассматривать крепление только локтевой кости. Но, говоря о лучезапястном суставе, мы заметили, что предплечье может поворачиваться, обеспечивая движение пронации/супинации кисти.

Рис. 18. Возможные движения в локтевом суставе и предплечье.
Это возможно из-за сложного устройства локтевого сустава, состоящего фактически из трёх отдельных суставов. В нём сходятся три кости - плечевая, локтевая и лучевая - и каждая пара костей соединяется своим суставом.
Локтевая кость крепится к плечевой суставом с одной степенью свободы, образуя цилиндрический шарнир. А вот лучевая соединяется с плечевой уже шаровидным суставом - аналогом шарового шарнира, с тремя степенями свободы. Подвижность лучевой кости относительно локтевой ограничивается двумя суставами, которыми они скреплены: в локте и в запястье.
Всё это сложное устройство приводит к тому, что лучевая кость может неким своеобразным образом проворачиваться вокруг локтевой. Кисть крепится именно к лучевой кости лучезапястным суставом и поэтому может воспользоваться её подвижностью. При этом локтевая кость остается неподвижной. Т. е. к одной степени свободы, которую имеет локтевой сустав, на протяжении предплечья добавляется ещё одна.
Заметим, что, хотя голень тоже состоит из двух костей - большеберцовой и малоберцовой, - но в ней отсутствует механизм, подобный предплечью, и обе эти кости двигаются как одна.
Дальнейший разбор и классификация суставов человеческого тела требуют отдельной статьи. А здесь мы попробуем усложнить наши механизмы. Мы будем добавлять ещё звенья, чтобы перейти от отдельных суставов к целым конечностям.
Звенья одной цепи
Соединим теперь три звена. Первое будет, как обычно, неподвижной опорой. Второе присоединим к нему цилиндрическим шарниром. А к свободному концу второго звена прикрепим ещё одно звено. Тоже цилиндрическим шарниром. Наш механизм для простоты сделаем плоским: пусть оси обоих шарниров будут параллельны, тогда все звенья будут двигаться в одной плоскости.

Рис. 19. Плоский механизм из трёх звеньев и двух цилиндрических шарниров.
Сколько координат нам понадобится, чтобы задать положение всего механизма? Первое звено неподвижно, его положение известно. Второе звено мы можем повернуть в шарнире на какой-то угол. Не любой: угол поворота как-то ограничен неподвижным звеном, но нам это не важно. Одного этого угла нам достаточно, чтобы задать положение второго звена. Зададим этот угол.
При этом дальний конец первого звена окажется во вполне определённой точке. Мы можем рассчитать положение этой точки по заданному углу и длине этого звена. (Длину звена мы не считаем координатой, поскольку она постоянна.) В этой точке находится шарнир, которым крепится третье звено. Значит, чтобы задать положение и этого звена, нам достаточно задать угол его поворота (например, относительно второго звена) - точно так же, как для второго звена.
Получается, что задав две координаты - два угла - мы задаём положение всего нашего механизма. Значит, у него две степени свободы.

Рис. 20. Плоский механизм из трёх звеньев с угловыми координатами.
Заметьте, что соединив звенья двумя шарнирами, каждый из которых даёт одну степень свободы, мы получили две степени свободы. Т. е. степени свободы просто складываются.
В теле подобный механизм можно найти в пальцах руки: это два последовательных фаланговых сустава.

Рис. 21. Палец руки как пример предыдущей схемы.
Теперь в нашем механизме из трёх звеньев заменим первый шарнир на шаровой, а второй так и оставим цилиндрическим.

Рис. 22. Механизм из трёх звеньев, шарового и цилиндрического шарниров.
Аналогией в нашем теле будет соединение предплечья и плеча с туловищем. При этом мы не учитываем способность предплечья поворачивать кисть.

Рис. 23. Плечо и предплечье как пример предыдущей схемы.
Если вы помните, шаровой шарнир имеет три степени свободы. Прибавляя к ним одну степень свободы второго шарнира, цилиндрического, получаем четыре степени свободы. И действительно: положение второго звена (первое - неподвижное) мы задаём тремя углами. При этом положение второго шарнира и направление его оси вычисляется. Поэтому для задания положения третьего звена нам нужен ещё только один угол его поворота в цилиндрическом шарнире. Значит, чтобы задать точное положение всего механизма, нужны четыре угловые координаты. И наш механизм действительно имеет четыре степени свободы.
Моя ладонь превратилась в кулак
Напоследок подсчитаем степени свободы у всей руки. Пальцы не будем учитывать: сожмём их в кулак. Туловище будем считать неподвижным звеном. Тогда имеем цепь из четырёх звеньев и трёх шарниров: туловище - плечевой сустав - плечо - локтевой сустав - предплечье - лучезапястный сустав - кисть.

Рис. 24. Степени свободы руки без учёта движений пальцев.
Начнём складывать степени свободы. Плечевой сустав - три степени свободы. Локтевой сустав - одна степень свободы. Предплечье - это не обычное звено, а целый механизм, добавляющий ещё одну степень свободы (пронация/супинация кисти). И две степени свободы даёт лучезапястный сустав. Складывая, получаем семь. Таким образом, рука человека (без учёта пальцев) имеет семь степеней свободы.
Ещё раз объясним, что означает это число. Мы выбрали некую механическую модель руки: неподвижно закреплённое туловище, кисть как единое звено (кулак). В этой модели нам нужно ровно семь координат, чтобы однозначно задать положение всей руки. Обопритесь ладонью о стол, зафиксировав таким образом положение кисти. При неподвижном туловище и ладони ваша рука всё равно может двигаться: ваш локоть описывает в воздухе дугу. Если мы хотим задать положение всей руки, определив и положение локтя, нам нужны эти семь координат и больше ничего.
Выше мы писали, что если тело двигается по какой-либо поверхности, то у него две степени свободы. Три - если мы хотим учитывать также и поворот тела в этой плоскости. Будем двигать ладонью по столу. Вот тело, которое двигается по поверхности. Значит, у ладони три степени свободы. А где же семь?
Но мы также писали, что подсчёт степеней свободы зависит от модели, от задачи. Если нам важно только положение ладони на столе и неважно, что там дальше к ней крепится и что с ним происходит, то степени свободы три. Если же мы хотим знать и положение всей руки, то семь.
Действительность ещё сложнее. Если мы, сидя за столом, потянулись за хлебом, то мы включаем дополнительно сложную механику пальцев, а также, возможно, наклон и поворот туловища. Если мы будем рассматривать такую, более сложную, модель, то и количество степеней свободы у всей системы будет гораздо больше. Как наш мозг управляется с расчётом такой кучи координат - опять-таки тема, требующая отдельной статьи.
Определение. Числом степеней свободы механической системы называется количество независимых величин , с помощью которых может быть задано положение системы в пространстве.
а) Так, положение в пространстве материальной точки полностью определяется заданием трёх её координат (например, декартовых x, y, z или сферических , т.е. число степеней свободыi=3 ).
б)
Система из 2-х жёстко связанных материальных
точек (отрезок, их соединяющий, фиксирован
 ).
Координаты этих 2-х точек связаны
соотношением,
при этом достаточно задать 5 координат,
а шестую можно найти из приведённого
соотношения, т.е.i
=5
.
Если точки не связаны между собой
жёстко, то число степеней свободы i=6
.
Изменение
).
Координаты этих 2-х точек связаны
соотношением,
при этом достаточно задать 5 координат,
а шестую можно найти из приведённого
соотношения, т.е.i
=5
.
Если точки не связаны между собой
жёстко, то число степеней свободы i=6
.
Изменение
 даёт ещё одну степень свободы, которая
называетсяколебательной
.
даёт ещё одну степень свободы, которая
называетсяколебательной
.
Положение
системы, состоящей из 2-х жёстко связанных
материальных точек (или, например,
стержня) можно задать следующим образом:
задать 3 координаты центра
инерции системы С
и 2 угла
 и
и
 ,
которыми определяется направление
в пространстве оси системы
(Рис. 7.1).
,
которыми определяется направление
в пространстве оси системы
(Рис. 7.1).
Закон равнораспределения энергии
В классической статической физике выводится закон Больцмана о равномерном распределении энергии по степеням свободы молекул: на каждую степень свободы молекулы приходится в среднем одинаковая кинетическая энергия, равная кТ . Необходимо отметить, что поступательное и вращательное движения связаны только с кинетической энергией, в то время как колебательное движение связано с наличием и кинетической и потенциальной энергий , причём среднее значение потенциальной и кинетической энергии оказывается одинаковым. Поэтому на каждую колебательную степень свободы приходится в среднем две половинки кТ. Средняя энергия молекулы должна равняться:
Для молекул с жёсткой связью между атомами i совпадает с числом степеней свободы молекулы.
Внутренняя энергия идеального газа
Определение. Внутренней энергией какого-либо тела называется энергия этого тела за вычетом кинетической энергии тела как целого и потенциальной энергии тела во внешнем поле сил. Она является функцией внутреннего состояния системы. Для идеального газа внутренняя энергия состоит из суммы энергий поступательного, вращательного и колебательного движений молекул . (Заметим, что в общем случае во внутреннюю энергию входят энергия взаимодействия атомов, энергия электронных оболочек, внутриядерная энергия и др.). Внутреннюю энергию одного моля идеального газа найдём, умножив число Авогадро на среднюю энергию одной молекулы:

Учитывая,
что
 ,
получим:
,
получим:
|
|

т.е. внутренняя энергия идеального газа является функцией температуры и пропорциональна ей, а также зависит от числа степеней свободы молекул . То, что внутренняя энергия является функцией состояния системы, означает, что всякий раз, когда система оказывается в данном состоянии, ее внутренняя энергия принимает присущее этому состоянию значение, независимо от предыстории системы. Следовательно, изменение внутренней энергии при переходе системы из одного состояния в другое будет всегда равно разности значений внутренней энергии в этих состояниях, независимо от пути, по которому совершался переход .
Свяжем
внутреннюю энергию с теплоёмкостью. По
определению теплоёмкость в процессе
при постоянном объёме
 ,
для идеального газа
,
для идеального газа
|
|

Соответственно
|
|

3 . Основное уравнение молекулярно-кинетической теории.
Постановка
задачи
.
Требуется получить связь между
макропараметрами – давлением P,
температурой T,
с микропараметрами – массой молекулы
m
,
её скоростью
 и концентрацией молекулn
.
и концентрацией молекулn
.
Пусть
имеется некоторый сосуд с газом. Будем
считать, что молекулы могут двигаться
вдоль осей x,
y,
z.
Выберем на стенке сосуда участок
поверхности
 (Рис. 7.2). Если в сосудеN
молекул, то
вследствие равновероятности этих
направлений вдоль каждой оси будет
двигаться
(Рис. 7.2). Если в сосудеN
молекул, то
вследствие равновероятности этих
направлений вдоль каждой оси будет
двигаться

|
|
молекул.
Половина из них движется вдоль данного
направления, т.е.
(ось имеет два направления). Предположим,
что все молекулы движутся с одинаковой
скоростью, равной
|


 .
Тогда за время
.
Тогда за время до элемента стенки
до элемента стенки долетят молекулы, заключённые в объёме
параллелепипеда с основанием
долетят молекулы, заключённые в объёме
параллелепипеда с основанием и высотой
и высотой
 .
Число этих молекул равно
.
Число этих молекул равнопроизведению
плотности молекул
 (где
(где объём
сосуда) на объём
объём
сосуда) на объём
 ,
т.е. число молекул, летящих к площади
,
т.е. число молекул, летящих к площади
 (1)
(1)
По закону сохранения импульса каждая молекула при ударе о стенку передаёт ей импульс (удар считается упругим), равный изменению импульса молекулы (Рис. 7.3, а, б ).
 .
(2)
.
(2)
По 2-му закону Ньютона:
 ,
(3)
,
(3)
где
 сила,
действующая со стороны молекулы на
стенку;
сила,
действующая со стороны молекулы на
стенку; длительность
взаимодействия молекулы со стенкой.
длительность
взаимодействия молекулы со стенкой.
Проблема деятельности человека в обществе тесно связана с пониманием свободы. Этому уделяется много внимания в философии. Существует две крайние точки зрения на свободу:
· свобода как возможность делать, что хочешь
· свобода как осознанная необходимость
Политическое определение свободы гласит, что человек вправе делать все, что хочет, за исключением того, что может помешать свободе другого человека. Свобода – это одно из главных условий становления личности , полного использования индивидуальных талантов и способностей человека. Это одна из величайших человеческих ценностей , за которую люди боролись и гибли. Условием свободы личности является возможность выбирать в соответствии со своей ценностной ориентацией, потребностями и интересами. Сделав выбор желаемого, человек тем самым снимает противоречие между свободой и необходимостью. Высшая степень свободы человека – это совпадение его стремления, воли, хотения и объективной необходимости.
Уровень развития культуры определяет границы свободы человека, поэтому свобода человека исторична. Однако недостаточно иметь право на свободу, нужно уметь пользоваться им. Человек в течение всей современной цивилизации стремился как можно полнее реализовать идеал свободы, но всегда остается несовпадение между «хочу» и «могу».
Вопрос о свободе личности в истории философии рассматривался с разных позиций, например:
а) позиция детерминизма (причинной обусловленности), представители которой считают, что во всякой ситуации выбора есть лишь одна реальная возможность, а остальные возможности лишь формальны. Крайним проявлением детерминизма является фатализм (от лат. fatalis – роковой, fatum – рок, судьба) – это мировоззрение, которое отрицает свободную волю человека и не признает ничего случайного. Согласно этому взгляду, все события и поступки людей заранее предопределены каким - либо внешними силами с общим названием судьба, рок (либо неумолимым стечением обстоятельств);
б) позиция индетерминизма – она является полной противоположностью детерминизму, его альтернативой. Представители индетерминизма отрицают причинную обусловленность явлений мира и считают, что у человека нет никакой судьбы, а есть множество возможностей и он совершенно свободен в выборе одной из них, без всякого принуждения извне. Крайней разновидностью индетерминизма является волюнтаризм (от лат. voluntas – воля) – направление в философии, рассматривающее волю в качестве высшего начала бытия. Его представители считают, что в мире «правит воля», т.е. жизнеспособность того или иного индивида, сообщества зависит исключительно от силы воли, а не от других качеств;
в) позиция альтернативизма (от лат. alter – другой), признающая, что в каждом выборе обязательно присутствует не менее двух реальных возможностей. Личность не вольна в выборе объективных условий своей деятельности – этот выбор также ограничен, но она вольна ставить себе цель действия, более или менее свободна в выборе средств для реализации этих целей. Свобода всегда относительна, ибо бывают ограниченной. Она ограничена самой жизнью, ее пространственно – временными рамками, возможностями выбора, законами государства, свободой других личностей. И, наконец, свобода ограничивается ответственностью за свои выбор действий и их последствий перед другими людьми. Ответственность – это исторически конкретный тип взаимоотношений между личностью, семьей, коллективом, обществом, являющихся осознанным выполнением ими взаимных требований. Если необходимость («надо») – это по преимуществу внешнее ограничение свободы, то ответственность – это внутренняя характеристика . Как права человека связаны с его обязанностями , так и свобода человека соотносится с его ответственностью . Герой повести Антуана де Сент Экзюпери «Маленький принц» говорит: «Мы ответственны за тех, кого мы приручили», «Быть человеком – это значит чувствовать, что ты за все в ответе».
Кого говорят об ответственности, то имеют в виду ответственность не только перед другими людьми, обществом, но и внутреннюю ответственность человека перед самим собой , перед «проектом» своей жизни, который человек считает нужным реализовать. Перед молодыми людьми открывается много жизненных путей, и возникает непростая проблема выбора одного варианта. Как бы ни был человек подвластен влиянию обстоятельств, друзей, родных, средств массовой информации, в конечном итоге он сам определяет свой путь в жизни и несет полную ответственность за свой выбор. И чем больше свобода , которой обладает человек, тем больше его ответственность за тот конкретный выбор, который он делает: «Кому много дано, с того и взыщется» (из русской пословицы).
У современного человека довольно часто встречаются обособленное понимание свободы без ее связи с ответственностью . А свобода личности подменяется свободой инстинкта, когда пропагандируется культ обнаженного тела, легализация мата, порнографии, наркотиков, проституции и т.п. Но история показывает, что чем больше места в жизни индивида занимает инстинкт , тем меньше остается времени и места для разумной деятельности . Человек становится игрушкой собственных инстинктов, забывая о своем главном отличии от животного – быть Человеком Разумным .
Нежелание отвечать за последствия своей деятельности, выполнять свой долг перед предыдущими и последующими поколениями иногда облекается в такую модную фразу: «Я никому ничего не должен». Этим человек как бы снимает с себя ответственность за всё происходящее, но тем самым обособляется от общества, выпадая из социального целого, которое предоставило ему свободу . Поэтому ответственность предполагает наличие у человека чувства долга и совести, умения осуществлять самоконтроль и самоуправление. Совесть выступает как контролер всех действий человека. Сделанный человеком выбор, принятое решение означает, что человек готов взять на себя всю полноту ответственности и даже за то, что он не смог предусмотреть. Неизбежность риска сделать что – то «не так» и «не то», предполагает наличие у человека мужества , необходимого на всех этапах его деятельности: и при принятии решения, и в процессе его реализации, и, особенно, в случае неудачи.
В настоящее время вершиной этической мысли является этика ответственности , над ней работают многие философские школы. Это связано с тем, что у современного общества много рисков, угрожающих жизни на планете. Сиюминутные выгоды несовместимы, с принципом ответственности.
В одном из предыдущих постов мы обсудили, пожалуй, центральное понятие в анализе данных и проверке гипотез - p-уровень значимости. Если мы не применяем байесовский подход, то именно значение p-value мы используем для принятия решения о том, достаточно ли у нас оснований отклонить нулевую гипотезу нашего исследования, т.е. гордо заявить миру, что у нас были получены статистически значимые различия.
Однако в большинстве статистических тестов, используемых для проверки гипотез, (например, t-тест, регрессионный анализ, дисперсионный анализ) рядом с p-value всегда соседствует такой показатель как число степеней свободы, он же degrees of freedom или просто сокращенно df, о нем мы сегодня и поговорим.
Степени свободы, о чем речь?
По моему мнению, понятие степеней свободы в статистике примечательно тем, что оно одновременно является и одним из самым важных в прикладной статистике (нам необходимо знать df для расчета p-value в озвученных тестах), но вместе с тем и одним из самых сложных для понимания определений для студентов-нематематиков, изучающих статистику.Давайте рассмотрим пример небольшого статистического исследования, чтобы понять, зачем нам нужен показатель df, и в чем же с ним такая проблема. Допустим, мы решили проверить гипотезу о том, что средний рост жителей Санкт-Петербурга равняется 170 сантиметрам. Для этих целей мы набрали выборку из 16 человек и получили следующие результаты: средний рост по выборке оказался равен 173 при стандартном отклонении равном 4. Для проверки нашей гипотезы можно использовать одновыборочный t-критерий Стьюдента, позволяющий оценить, как сильно выборочное среднее отклонилось от предполагаемого среднего в генеральной совокупности в единицах стандартной ошибки:

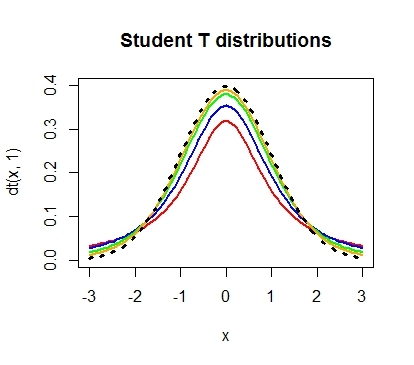
Проведем необходимые расчеты и получим, что значение t-критерия равняется 3, отлично, осталось рассчитать p-value и задача решена. Однако, ознакомившись с особенностями t-распределения мы выясним, что его форма различается в зависимости от числа степеней свобод, рассчитываемых по формуле n-1, где n - это число наблюдений в выборке:
Сама по себе формула для расчета df выглядит весьма дружелюбной, подставили число наблюдений, вычли единичку и ответ готов: осталось рассчитать значение p-value, которое в нашем случае равняется 0.004.
Но почему n минус один?
Когда я впервые в жизни на лекции по статистике столкнулся с этой процедурой, у меня как и у многих студентов возник законный вопрос: а почему мы вычитаем единицу? Почему мы не вычитаем двойку, например? И почему мы вообще должны что-то вычитать из числа наблюдений в нашей выборке?В учебнике я прочитал следующее объяснение, которое еще не раз в дальнейшем встречал в качестве ответа на данный вопрос:
“Допустим мы знаем, чему равняется выборочное среднее, тогда нам необходимо знать только n-1 элементов выборки, чтобы безошибочно определить чему равняется оставшейся n элемент”. Звучит разумно, однако такое объяснение скорее описывает некоторый математический прием, чем объясняет зачем нам понадобилось его применять при расчете t-критерия. Следующее распространенное объяснение звучит следующим образом: число степеней свободы - это разность числа наблюдений и числа оцененных параметров. При использовании одновыборочного t-критерия мы оценили один параметр - среднее значение в генеральной совокупности, используя n элементов выборки, значит df = n-1.
Однако ни первое, ни второе объяснение так и не помогает понять, зачем же именно нам потребовалось вычитать число оцененных параметров из числа наблюдений?
Причем тут распределение Хи-квадрат Пирсона?
Давайте двинемся чуть дальше в поисках ответа. Сначала обратимся к определению t-распределения, очевидно, что все ответы скрыты именно в нем. Итак случайная величина:
Имеет t-распределение с df = ν, при условии, что Z – случайная величина со стандартным нормальным распределением N(0; 1), V – случайная величина с распределением Хи-квадрат, с ν числом степеней свобод, случайные величины Z и V независимы. Это уже серьезный шаг вперед, оказывается, за число степеней свободы ответственна случайная величина с распределением Хи-квадрат в знаменателе нашей формулы.
Давайте тогда изучим определение распределения Хи-квадрат. Распределение Хи-квадрат с k степенями свободы - это распределение суммы квадратов k независимых стандартных нормальных случайных величин.
Кажется, мы уже совсем у цели, по крайней мере, теперь мы точно знаем, что такое число степеней свободы у распределения Хи-квадрат - это просто число независимых случайных величин с нормальным стандартным распределением, которые мы суммируем. Но все еще остается неясным, на каком этапе и зачем нам потребовалось вычитать единицу из этого значения?
Давайте рассмотрим небольшой пример, который наглядно иллюстрирует данную необходимость. Допустим, мы очень любим принимать важные жизненные решения, основываясь на результате подбрасывания монетки. Однако, последнее время, мы заподозрили нашу монетку в том, что у нее слишком часто выпадает орел. Чтобы попытаться отклонить гипотезу о том, что наша монетка на самом деле является честной, мы зафиксировали результаты 100 бросков и получили следующий результат: 60 раз выпал орел и только 40 раз выпала решка. Достаточно ли у нас оснований отклонить гипотезу о том, что монетка честная? В этом нам и поможет распределение Хи-квадрат Пирсона. Ведь если бы монетка была по настоящему честной, то ожидаемые, теоретические частоты выпадания орла и решки были бы одинаковыми, то есть 50 и 50. Легко рассчитать насколько сильно наблюдаемые частоты отклоняются от ожидаемых. Для этого рассчитаем расстояние Хи-квадрат Пирсона по, я думаю, знакомой большинству читателей формуле:

Где O - наблюдаемые, E - ожидаемые частоты.
Дело в том, что если верна нулевая гипотеза, то при многократном повторении нашего эксперимента распределение разности наблюдаемых и ожидаемых частот, деленная на корень из наблюдаемой частоты, может быть описано при помощи нормального стандартного распределения, а сумма квадратов k таких случайных нормальных величин это и будет по определению случайная величина, имеющая распределение Хи-квадрат.
Давайте проиллюстрируем этот тезис графически, допустим у нас есть две случайные, независимые величины, имеющих стандартное нормальное распределение. Тогда их совместное распределение будет выглядеть следующим образом:

При этом квадрат расстояния от нуля до каждой точки это и будет случайная величина, имеющая распределение Хи-квадрат с двумя степенями свободы. Вспомнив теорему Пифагора, легко убедиться, что данное расстояние и есть сумма квадратов значений обеих величин.
Пришло время вычесть единичку!
Ну а теперь кульминация нашего повествования. Возвращаемся к нашей формуле расчета расстояния Хи-квадрат для проверки честности монетки, подставим имеющиеся данные в формулу и получим, что расстояние Хи-квадрат Пирсона равняется 4. Однако для определения p-value нам необходимо знать число степеней свободы, ведь форма распределения Хи-квадрат зависит от этого параметра, соответственно и критическое значение также будет различаться в зависимости от этого параметра.
Теперь самое интересное. Предположим, что мы решили многократно повторять 100 бросков, и каждый раз мы записывали наблюдаемые частоты орлов и решек, рассчитывали требуемые показатели (разность наблюдаемых и ожидаемых частот, деленная на корень из ожидаемой частоты) и как и в предыдущем примере наносили их на график.

Легко заметить, что теперь все точки выстраиваются в одну линию. Все дело в том, что в случае с монеткой наши слагаемые не являются независимыми, зная общее число бросков и число решек, мы всегда можем точно определить выпавшее число орлов и наоборот, поэтому мы не можем сказать, что два наших слагаемых - это две независимые случайные величины. Также вы можете убедиться, что все точки действительно всегда будут лежать на одной прямой: если у нас выпало 30 орлов, значит решек было 70, если орлов 70, то решек 30 и т.д. Таким образом, несмотря на то, что в нашей формуле было два слагаемых, для расчета p-value мы будем использовать распределение Хи-квадрат с одной степенью свободы! Вот мы наконец-то добрались до момента, когда нам потребовалось вычесть единицу. Если бы мы проверяли гипотезу о том, что наша игральная кость с шестью гранями является честной, то мы бы использовали распределение Хи-квадрат с 5 степенями свободы. Ведь зная общее число бросков и наблюдаемые частоты выпадения любых пяти граней, мы всегда можем точно определить, чему равняется число выпадений шестой грани.
Все становится на свои места
Теперь, вооружившись этими знаниями, вернемся к t-тесту:
В знаменателе у нас находится стандартная ошибка, которая представляет собой выборочное стандартное отклонение, делённое на корень из объёма выборки. В расчет стандартного отклонения входит сумма квадратов отклонений наблюдаемых значений от их среднего значения - то есть сумма нескольких случайных положительных величин. А мы уже знаем, что сумма квадратов n случайных величин может быть описана при помощи распределения хи-квадрат. Однако, несмотря на то, что у нас n слагаемых, у данного распределения будет n-1 степень свободы, так как зная выборочное среднее и n-1 элементов выборки, мы всегда можем точно задать последний элемент (отсюда и берется это объяснение про среднее и n-1 элементов необходимых для однозначного определения n элемента)! Получается, в знаменателе t-статистики у нас спрятано распределение хи-квадрат c n-1 степенями свободы, которое используется для описания распределения выборочного стандартного отклонения! Таким образом, степени свободы в t-распределении на самом деле берутся из распределения хи-квадрат, которое спрятано в формуле t-статистики. Кстати, важно отметить, что все приведенные выше рассуждения справедливы, если исследуемый признак имеет нормальное распределение в генеральной совокупности (или размер выборки достаточно велик), и если бы у нас действительно стояла цель проверить гипотезу о среднем значении роста в популяции, возможно, было бы разумнее использовать непараметрический критерий.
Схожая логика расчета числа степеней свободы сохраняется и при работе с другими тестами, например, в регрессионном или дисперсионном анализе, все дело в случайных величинах с распределением Хи-квадрат, которые присутствуют в формулах для расчета соответствующих критериев.
Таким образом, чтобы правильно интерпретировать результаты статистических исследований и разбираться, откуда возникают все показатели, которые мы получаем при использовании даже такого простого критерия как одновыборочный t-тест, любому исследователю необходимо хорошо понимать, какие математические идеи лежат в основании статистических методов.
Онлайн курсы по статистике: объясняем сложные темы простым языком
Основываясь на опыте преподавания статистики в , у нас возникла идея создать серию онлайн курсов, посвященных анализу данных, в которых в доступной для каждого форме будут объясняться наиболее важные темы, понимание которых необходимо для уверенного использования методов статистики при решении различного рода задача. В 2015 году мы запустили курс Основы статистики , на который к сегодняшнему дню записалось около 17 тысяч человек, три тысячи слушателей уже получили сертификат о его успешном завершении, а сам курс был награждён премией EdCrunch Awards и признан лучшим техническим курсом. В этом году на платформе stepik.org стартовало продолжение курса Основы статистики. Часть два , в котором мы продолжаем знакомство с основными методами статистики и разбираем наиболее сложные теоретические вопросы. Кстати, одной из главных тем курса является роль распределения Хи-квадрат Пирсона при проверке статистических гипотез. Так что если у вас все еще остались вопросы о том, зачем мы вычитаем единицу из общего числа наблюдений, ждем вас на курсе!Стоит также отметить, что теоретические знания в области статистики будут определенно полезны не только тем, кто применяет статистику в академических целях, но и для тех, кто использует анализ данных в прикладных областях. Базовые знания в области статистики просто необходимы для освоения более сложных методов и подходов, которые используются в области машинного обучения и Data Mining. Таким образом, успешное прохождение наших курсов по введению в статистику - хороший старт в области анализа данных. Ну а если вы всерьез задумались о приобретении навыков работы с данными, думаем, вас может заинтересовать наша онлайн - программа по анализу данных, о которой мы подробнее писали . Упомянутые курсы по статистике являются частью этой программы и позволят вам плавно погрузиться в мир статистики и машинного обучения. Однако пройти эти курсы без дедлайнов могут все желающие и вне контекста программы по анализу данных.
Теги: Добавить метки

