14.04.2019
On degrees of freedom in statistics. If you represent this in the form of a graphical scheme, then this will be the only line with mandatory event points. And, as always - there is, was and will be - our free choice in this matter: if we want, we change and change our lives.
Everything you wanted to know about it but didn't know you wanted it.
When talking about the biomechanics of the human body, the concept of degrees of freedom often arises. For example, it is difficult to do without this when speaking about the structure and classification of joints. However, the way these degrees of freedom are calculated and the resulting numbers often remain in some kind of fog. This article is for those who felt some dissatisfaction and lack of clarity after such conversations.
First, let's explain on the fingers.
On fingers
If we compare a steam locomotive running on rails and a steamboat running on the sea, what is the difference between their movement? A locomotive can only travel on rails. He won't go anywhere with them. It can only back up.
The ship, unlike him, is free to sail in any direction. Especially if there is an endless ocean around him. The locomotive travels only along the line, and the steamer - already along the plane. (Well, okay - along the surface of a sphere. Or rather, a geoid.) For now, let's say - loosely and not very correctly from the point of view of the accepted terminology - that the degree of freedom of a steamer is clearly greater than that of a steam locomotive.
Now let's take a plane. He has more freedom. He can already take to the air. It can hit any point in space. Unless, of course, the dispatch service allows him.
So far, we have only looked at the movements of all these machines, or, as physicists usually say, bodies. But there are also twists and turns. A locomotive cannot turn its nose up (rise), lean to the side (tilt), or stand sideways across the rails (turn). Yes, if the track makes a turn, then the locomotive will turn along with the rails. But not by myself. Therefore, such turns are not considered. They do not increase the degree of freedom of the locomotive.
The ship can already make a turn. Let the sea be calm and smooth as glass for the time being, so that it can be more easily considered a plane. Then the rise of the steamer is inaccessible as well as the steam locomotive. Tilt the steamer on its side, probably a bit difficult. But if we take a small sailing yacht, then tilting it seems to be no problem. Judging by the photographs, they for the most part they swim like this: leaning to the side, with the crew hanging overboard and striking their butts along the crests of the waves.
But the plane can do everything: raise / lower the nose, and lean to the side, and turn. Especially if it is controlled by an ace from the Russian Knights squad. They even fly backwards. And upside down. Which, however, no longer increases the degree of freedom of the aircraft - it is already maximum.
For contrast and for generality, let us imagine a mechanism with a zero degree of freedom. It just doesn't go anywhere: it's broken. And it was not possible to start from the pusher.
Now we will gradually begin to induce scientific rigor.
One degree of freedom
Let's begin to express ourselves more correctly. We will say: "degrees of freedom", in the plural. There may be zero, one, two, and so on. It's just a number. Natural, that is, a positive integer. Now you need to understand how they are considered.
Let's go back to the beginning - to the locomotive. Suppose we need to know how to accurately set its position on a straight section of the path near the station. He can't turn anywhere. It can’t go to another path either: we prudently switched all the arrows so that it doesn’t go anywhere. All he can do is travel a few hundred meters in one direction or another. reverse side. How do we set its position? Yes, just a distance from some point on the way. For example, from a point that is directly opposite the entrance to the station. If a steam locomotive traveled 100 meters from the station towards St. Petersburg, then we only need one number of 100 meters to know where it is now. And if he drove the same 100 meters towards Moscow? This is another case. Then we will write a negative number: -100 m. And again we will know exactly where the locomotive is.
Rice. 1. Steam locomotive on a straight section of rails.
So what have we got? To know the exact location of the locomotive in our situation, we need only one number. This means that the locomotive - within the framework of the situation we invented - has one degree of freedom. And this number itself will be called the coordinate of the locomotive. The only coordinate we need to know. Or which we need to tell the engineer so that he knows where to drive the locomotive.
Let now we have not a straight rail track, but a winding one. Does it change anything? Nothing, as long as the locomotive can't get away from this path. In the same way we can measure the distance along the rails, and in the same way we can set the position of the steam locomotive with one number - the distance from the station. It still has only one coordinate, only one degree of freedom.
We can come up with another coordinate system for it. Let it not be a real steam locomotive, but a toy one that runs in a circle. In this case, we can still take the distance from the toy station as a coordinate. 20 cm - the train drove off clockwise. -20 cm - and this is counterclockwise.

Rice. 2. Locomotive on a rail circle. Coordinate - distance.
But since we have a circle - more precisely, a circle - it may seem more convenient for us to set the position of the locomotive by an angle. We mark the center of the circle, put the protractor there and measure the angle between the direction to the station - it will be zero - and the direction to the train. Here he drove 90 ° clockwise - we consider that his coordinate is 90 °. But he drove 90 ° counterclockwise - then his coordinate will be -90 °.

Rice. 3. Locomotive on a rail circle. Coordinate - angle.
But we still need only one coordinate. We have gone from distances to angles, but nothing has changed. The locomotive still has one degree of freedom.
Let's do that too. Since we remember all the time hour hand, then we use the clock. Let's put them in the center of the circle and mark the position of the train in minutes on the dial. Or hours - this is less accurate, but convenient. Train for 3 hours or 9 hours - what could be easier? And again, it has only one coordinate. And one degree of freedom.

Rice. 4. Locomotive on a rail circle. Coordinate - hours on the dial.
Let's generalize: if a body can move only along one line, arbitrarily curved, it has one degree of freedom. But this is if we only talk about the location of the body and do not take into account its turns, inclinations and rises. Why don't we take into account? Maybe we don't care. Or maybe it cannot go anywhere, like a locomotive on rails.
Two degrees of freedom
So, what about the steamer that sails on the sea? How many coordinates do we need in this case? You can look at the GPS navigator and see: two coordinates. Longitude and latitude. How they are considered there, we no longer care. As long as we are not interested in where the ship turned its bow, but only in what point of the sea it is located, we only need two coordinates that the GPS system gives us.

Rice. 5. Steamboat at sea. Coordinates: latitude and longitude.
We can come up with our own coordinate system. Let, for example, the ship floats only in the visibility zone, and we have a compass and a rangefinder. Then we can take as coordinates the direction to the ship (the angle determined by the compass) and the distance to it (by the range finder) from the lighthouse, on the tower of which we climbed and which we designated as the origin of coordinates. In mathematics, such a coordinate system is called polar.

Rice. 6. Steamer in polar coordinates.
And again we get two coordinates. And two degrees of freedom for the ship. And again a note: in this case, we are only interested in the position of the ship in the sea. And we are not interested in where he turned his nose and how he bent.
And if we don’t have a ship on the sea, but a hiker in the mountains? It does not matter, the tourist also has a navigator and he sees the same two coordinates on it. That is, the surface does not have to be flat.
Let's generalize: if a body can move only on some surface, even if it is not flat, it has two degrees of freedom. Of course, if we are not interested in its twists and turns.
Three degrees of freedom
Now it's easy to deal with the plane. In addition to the two coordinates that the navigator will give us, we also need the flight altitude, which we will determine with an altimeter. (The GPS system also calculates the height, but rather approximately.) We get three coordinates and, accordingly, three degrees of freedom.
For an airplane, we can also enter polar coordinates, only a little more complicated. We will need two angles: the direction to the plane horizontally (compass), the direction to the plane vertically (some kind of goniometer), and also one distance - from us to the plane (range finder). And we again get three coordinates.

Rice. 7. Aircraft in polar coordinates.
Let's generalize: if a body can move anywhere in three-dimensional space, it has three degrees of freedom. Again, if we are not interested in how it turned and where it leaned.
What if you're interested?
Lift, tilt, turn
Let's not go back to the locomotive, we'll stay with the plane, let's consider the most difficult case.
If it is important for us, not only where the plane is currently flying, but also how it is located in the air (I think this is important for the pilot), then the three coordinates already available are not enough for us.
The plane can lift or lower its nose - we will call it lifting. It can lean to the right or to the left - this is what we call a slope. And it can turn right or left - it will be a turn. We get three corners - three new coordinates. There are six coordinates in total. And our plane has six degrees of freedom.

Rice. 8. Angular coordinates of the aircraft: lift, tilt and turn. In the picture with a twist - a top view.
We generalize: the body in space has six degrees of freedom. And six coordinates: three spatial and three angular.
With the steamer and the steam locomotive, you can probably figure it out yourself.
However, one important remark needs to be made.
So three or six?
It turns out that the number of degrees of freedom of any body is not its invariable property. This is a conditional value, which depends on what we need to know, on the conditions of our task. You can see for yourself: first, we counted three degrees of freedom for the aircraft, and, having changed the conditions of the problem, all six. Both of these answers are correct. But for different questions.
Are you, for example, sure that twice two is always four? Multiply 2 meters - the length of a square room - by 2 meters - its own width. We get 4 square meters - the area of \u200b\u200bthe room. Any realtor will agree with this. Now take 2 meters of steel pipe and multiply by another 2 meters of the same pipe. And where do you see the resulting 4 square meters? They do not exist in nature. The calculation was clearly meaningless.
Let's check the addition. One plus one equals two. Take one liter of alcohol and one liter of water and mix. Chemistry assures us that we will never get 2 liters of diluted alcohol. The properties of alcohol and water are such that the volume (namely, the volume, not the mass!) of the solution will always be less than the sum of the initial volumes. Similarly, by mixing a glass of water and a glass of salt, we do not get two glasses of brine. Chemistry will deceive us this time too.
Even arithmetic can be wrong. If you use it recklessly.
For collection - zero degrees of freedom
Zero is clear without words. A broken mechanism that doesn’t go anywhere and that you can’t turn off the spot. No coordinates are needed - and it's so clear where he stands. Zero degrees of freedom.
closer to the body
Now we will move towards biomechanics. Let's talk about mechanisms.
Those mechanisms that we have been talking about so far - steam locomotives, airplanes - we actually considered not as mechanisms, but as simply bodies. We did not care about their internal structure. Now let's take a look at the arrangement of mechanisms. But much more simple.
We will consider mechanical systems consisting of solid, inextensible and rigid links connected by hinges. To begin with, we will consider two types of hinges: cylindrical and spherical.
A cylindrical hinge, or hinge, is a connection between two links that allows them to rotate around a common axis. Or, if we consider one link to be fixed - a fixed support - then this hinge allows the second link to rotate around the hinge axis.

Rice. 9. Cylindrical hinge: with two free links and with one fixed link - support.
Where can we find such a compound in the human body? This is, for example, the elbow joint. Interphalangeal joints of fingers. The knee joint, as a first approximation, is also suitable, although with it everything is somewhat more complicated: here the real biomechanics strongly deviates from the abstract mechanism.

Rice. 10. Elbow joint (cut). (According to Sinelnikov.)
The second type of joint is the ball joint, where the links rotate around a common point. Again, one link can be considered a fixed support, then the second link can rotate around some point of this hinge. Points, not axes.

Rice. 11. Ball joint: with two free links and with one fixed link - support.
Which joints in our body fit this model? Shoulder and hip.

Rice. 12. shoulder joint(cut). (According to Sinelnikov.)

Rice. 13. hip joint(cut). (According to Sinelnikov.)
Hinges and degrees of freedom
Take a cylindrical hinge with one fixed link. In the figure, the fixed link is shown simply as a fixed support. A free link can move in only one way: rotate around the hinge axis, while remaining in the same plane. At the same time, its loose end moves only along one line - an arc of a circle centered on the hinge axis.
In our body, the analog will be, for example, the elbow joint. We only need to fix humerus. To do this, simply lean your elbow on the table and try not to move your shoulder.
How can we set the position of the free link? How many coordinates do we need for this? Since we can only rotate it around its axis, we just need to set the rotation angle. This will be the only coordinate we need. For the elbow joint - the same.

Rice. 14. Cylindrical hinge and its possible movements.
It turns out that both the cylindrical hinge and the elbow joint have one degree of freedom.
Now consider the ball joint and its analogue - the shoulder joint. Fasten one hinge link again. To fix the link of the shoulder joint, it is enough for us to try not to move the shoulder blade.
The ball joint allows for many more different movements. The free link can swing in it in all directions. In addition, it can rotate around its own longitudinal axis, while remaining in place. Our shoulder can do the same. The loose end of the free link moves in this case not along the line, but along the section of the sphere with the center in the hinge.
In order to uniquely set the position of the link, we need three angles. Two of them set the inclination of the link in space, and the third - the rotation of the link around its own axis. We get three coordinates and three degrees of freedom for the ball joint and shoulder joint.

Rice. 15. Ball joint and its possible movements.
One, three... But where are two?
You may have noticed that when talking about hinges, we jumped from one degree of freedom to three at once. Are there hinges that have two degrees of freedom? There is no simple hinge, but there is a mechanism that actually consists of three links: a cardan drive. Its free end can, like in a ball joint, tilt in any direction, but cannot rotate around its own longitudinal axis. This is precisely the basis for the use of cardans in rear-wheel drive vehicles.

Rice. 16. Cardan transmission.
In the human body, of course, there are no cardan gears, but joints with two degrees of freedom are found. This is, for example, the wrist joint. Having fixed the forearm, we can tilt the hand as we like, but we cannot turn it around the longitudinal axis. If you still managed to turn the hand while checking this, it means that you did not fix the forearm sufficiently and used its mobility. Grasp yourself just above the wrist with your other hand, do not let your forearm turn, and you will see that the hand does not turn. This joint has only two degrees of freedom.
Human joints are generally much more complex than simple hinges. Let's give a couple more examples of joints that do not fit the simplest mechanical schemes.
tree of life
It seems that the knee joint is quite suitable for the scheme of the cylindrical hinge. If we fix the hip - for example, sit on a table with our legs dangling - then the knee will swing, drawing an arc, just like a free hinge link. But, in fact, with a bent knee, the lower leg can also rotate a little around its longitudinal axis, adding another degree of freedom to the knee joint. When we bend the knee, the tension on some of the ligaments in the knee joint is loosened, the tibia becomes looser and there is a possibility of rotation that is not present when the knee is straight. It turns out that the knee joint has one degree of freedom with an almost straightened knee and two with a bent one.

Rice. 17. Possible movements in the knee joint.
We also cited the elbow joint as an example of a cylindrical joint. And he really fits this scheme if we consider the attachment of only the ulna. But, speaking of the wrist joint, we noticed that the forearm can rotate, providing a movement of pronation / supination of the hand.

Rice. 18. Possible movements in the elbow joint and forearm.
This is possible due to the complex structure of the elbow joint, which actually consists of three separate joints. Three bones converge in it - the humerus, ulna and radius - and each pair of bones is connected by its joint.
The ulna is attached to the shoulder joint with one degree of freedom, forming a cylindrical hinge. But the radial joint is connected to the shoulder joint, which is already a spherical joint - an analogue of a ball joint, with three degrees of freedom. The mobility of the radius relative to the ulna is limited by the two joints with which they are fastened: at the elbow and at the wrist.
All this complex device leads to the fact that the radius can rotate around the ulna in some peculiar way. The hand is attached precisely to the radius by the wrist joint and therefore can take advantage of its mobility. In this case, the ulna remains motionless. That is, to one degree of freedom that the elbow joint has, another one is added along the forearm.
Note that although the lower leg also consists of two bones - the tibia and the fibula - but it lacks a mechanism similar to the forearm, and both of these bones move as one.
Further analysis and classification of the joints of the human body require a separate article. And here we will try to complicate our mechanisms. We will add more links to go from individual joints to whole limbs.
Links of one chain
Let's connect three links now. The first will be, as usual, a fixed support. We will attach the second to it with a cylindrical hinge. And to the free end of the second link we will attach another link. Also cylindrical. For simplicity, we will make our mechanism flat: let the axes of both hinges be parallel, then all links will move in the same plane.

Rice. 19. Flat mechanism of three links and two cylindrical hinges.
How many coordinates do we need to set the position of the entire mechanism? The first link is motionless, its position is known. We can rotate the second link in the hinge at some angle. Not any: the angle of rotation is somehow limited by the fixed link, but this is not important to us. This angle alone is enough for us to set the position of the second link. Let's set this angle.
In this case, the far end of the first link will be at a well-defined point. We can calculate the position of this point given the angle and length of this link. (We do not consider the length of the link as a coordinate, since it is constant.) At this point there is a hinge that secures the third link. This means that in order to set the position of this link, it is enough for us to set the angle of its rotation (for example, relative to the second link) - exactly the same as for the second link.
It turns out that by setting two coordinates - two angles - we set the position of our entire mechanism. So it has two degrees of freedom.

Rice. 20. Flat mechanism of three links with angular coordinates.
Note that by connecting the links with two hinges, each of which gives one degree of freedom, we got two degrees of freedom. That is, the degrees of freedom simply add up.
In the body, a similar mechanism can be found in the fingers of the hand: these are two successive phalangeal joints.

Rice. 21. The finger of the hand as an example of the previous diagram.
Now in our mechanism of three links, we will replace the first hinge with a ball joint, and leave the second one cylindrical.

Rice. 22. The mechanism of three links, ball and cylindrical joints.
The analogy in our body would be the connection of the forearm and shoulder with the torso. At the same time, we do not take into account the ability of the forearm to turn the hand.

Rice. 23. Shoulder and forearm as an example of the previous diagram.
If you remember, a ball joint has three degrees of freedom. Adding to them one degree of freedom of the second hinge, cylindrical, we get four degrees of freedom. And indeed: the position of the second link (the first - motionless) we set by three angles. In this case, the position of the second hinge and the direction of its axis are calculated. Therefore, to set the position of the third link, we need only one more angle of its rotation in the cylindrical hinge. This means that in order to set the exact position of the entire mechanism, four angular coordinates are needed. And our mechanism really has four degrees of freedom.
My hand has turned into a fist
Finally, let's calculate the degrees of freedom of the whole hand. We will not take into account the fingers: we will clench them into a fist. The trunk will be considered as a fixed link. Then we have a chain of four links and three hinges: torso - shoulder joint - shoulder - elbow joint - forearm - wrist joint - hand.

Rice. 24. Degrees of freedom of the hand without taking into account the movements of the fingers.
Let's start adding the degrees of freedom. Shoulder joint - three degrees of freedom. The elbow joint is one degree of freedom. The forearm is not an ordinary link, but a whole mechanism that adds another degree of freedom (pronation / supination of the hand). And the wrist joint gives two degrees of freedom. Adding up, we get seven. Thus, the human hand (excluding fingers) has seven degrees of freedom.
Once again, let's explain what this number means. We have chosen some mechanical model hands: a fixed torso, a hand as a single link (fist). In this model, we need exactly seven coordinates to uniquely define the position of the entire hand. Lean your palm on the table, thus fixing the position of the brush. With a stationary torso and palm, your arm can still move: your elbow describes an arc in the air. If we want to set the position of the entire arm, while also defining the position of the elbow, we need these seven coordinates and nothing else.
We wrote above that if a body moves on any surface, then it has two degrees of freedom. Three - if we also want to take into account the rotation of the body in this plane. Let's move our palms across the table. Here is a body that moves on the surface. So, the palm has three degrees of freedom. Where is seven?
But we also wrote that the calculation of degrees of freedom depends on the model, on the task. If we only care about the position of the palm on the table and it doesn’t matter what is attached to it and what happens to it, then there are three degrees of freedom. If we want to know the position of the whole hand, then seven.
Reality is even more complicated. If we, sitting at the table, reached for bread, then we turn on the additional complex mechanics of the fingers, as well as, possibly, tilting and turning the torso. If we consider such a more complex model, then the number of degrees of freedom for the entire system will be much greater. How our brain manages to calculate such a bunch of coordinates is again a topic that requires a separate article.
Definition. Number of degrees of freedom mechanical system is called number of independent variables, which can be used to set system position in space.
a) So, position in space material point is completely determined by setting its three coordinates (for example, Cartesian x, y, z or spherical, i.e. the number of degrees of freedom i=3).
b) A system of 2 rigidly connected material points (the segment connecting them is fixed  ). The coordinates of these 2 points are related by a ratio, while it is enough to set 5 coordinates, and the sixth one can be found from the above ratio, i.e. i=5
. If the points are not rigidly connected, then the number of degrees of freedom i=6. Change
). The coordinates of these 2 points are related by a ratio, while it is enough to set 5 coordinates, and the sixth one can be found from the above ratio, i.e. i=5
. If the points are not rigidly connected, then the number of degrees of freedom i=6. Change  gives another degree of freedom, which is called vibrational.
gives another degree of freedom, which is called vibrational.
The position of a system consisting of 2 rigidly connected material points (or, for example, a rod) can be set as follows: set 3 coordinates center of inertia of the system C And 2 corners
 And
And
 ,
which determine direction in space of the axis of the system(Fig. 7.1).
,
which determine direction in space of the axis of the system(Fig. 7.1).
The law of equipartition of energy
In classical static physics, Boltzmann's law is derived for the uniform distribution of energy over the degrees of freedom of molecules: for each degree of freedom of a molecule, there is on average the same kinetic energy equal tokT. It should be noted that translational and rotational motions are associated only with kinetic energy, while oscillatory motion is associated with the presence of both kinetic and potential energies, and the average value of the potential and kinetic energy turns out to be the same. Therefore, for each vibrational degree of freedom, there are on average two halves kt. The average energy of a molecule should be equal to:
For molecules with a rigid bond between atoms i coincides with the number of degrees of freedom of the molecule.
Internal energy of an ideal gas
Definition. internal energy of any body is called the energy of this body minus the kinetic energy of the body as a whole and potential energy bodies in an external field forces. It is a function of the internal state of the system. For an ideal gas internal energy consists of the sum of the energies of translational, rotational and oscillatory movements molecules. (Note that in general case internal energy includes the energy of interaction of atoms, the energy of electron shells, intranuclear energy, etc.). We find the internal energy of one mole of an ideal gas by multiplying the Avogadro number by the average energy of one molecule:

Given that  , we get:
, we get:
|
|

those. the internal energy of an ideal gas is temperature function and is proportional to it, and also depends on the number of degrees of freedom of molecules. The fact that the internal energy is a function of the state of the system means that whenever the system is in a given state, its internal energy takes on the value inherent in this state, regardless of the history of the system. Consequently, change in internal energy during the transition of the system from one state to another will always be equal to the difference between the values of the internal energy in these states, regardless of the path along which the transition was made.
Let's connect internal energy with heat capacity. By definition, the heat capacity in a process at constant volume  , for an ideal gas
, for an ideal gas
|
|

Respectively
|
|

3 . Basic equation of molecular-kinetic theory.
Formulation of the problem. It is required to obtain a relationship between macro-parameters - pressure P, temperature T, with micro-parameters - the mass of the molecule m, its speed  and concentration of molecules n.
and concentration of molecules n.
Let there be some vessel with gas. We assume that the molecules can move along the x, y, z axes. Select a surface area on the vessel wall  (Fig. 7.2). If in a vessel N
molecules, then due to the equiprobability of these directions along each axis will move
(Fig. 7.2). If in a vessel N
molecules, then due to the equiprobability of these directions along each axis will move 
|
|
molecules. Half of them move along this direction, i.e. (the axis has two directions). Let us assume that all molecules move at the same speed, equal to |


 . Then in time
. Then in time  up to the wall element
up to the wall element  molecules will fly enclosed in the volume of a parallelepiped with a base
molecules will fly enclosed in the volume of a parallelepiped with a base  and height
and height 
 . The number of these molecules is
. The number of these molecules isthe product of the molecular density  (where
(where  vessel volume) per volume
vessel volume) per volume 
 , i.e. the number of molecules flying towards the area
, i.e. the number of molecules flying towards the area
 (1)
(1)
According to the law of conservation of momentum, each molecule, when hitting a wall, transfers to it a momentum (the impact is considered elastic), equal to the change in the momentum of the molecule(Figure 7.3, a, b).
 .
(2)
.
(2)
According to Newton's 2nd law:
 ,
(3)
,
(3)
where  the force acting from the side of the molecule on the wall;
the force acting from the side of the molecule on the wall;  the duration of the interaction of the molecule with the wall.
the duration of the interaction of the molecule with the wall.
The problem of human activity in society is closely connected with the understanding of freedom. Much attention is paid to this in philosophy. There are two extreme views on freedom:
· freedom is the ability to do what you want
· freedom as a recognized necessity
The political definition of freedom states that a person has the right to do whatever he wants, with the exception of what may interfere with the freedom of another person. Freedom is one of the main conditions for the formation of personality full use of individual talents and abilities of a person. This is one of the greatest human values for which people fought and died. The condition for individual freedom is opportunity to choose in accordance with its value orientation, needs and interests. Having made a choice of what is desired, a person thereby removes the contradiction between freedom and necessity. The highest degree of human freedom is the coincidence of his aspiration, will, desire and objective necessity.
The level of development of culture determines the boundaries of human freedom, therefore human freedom is historical. However, it is not enough to have the right to freedom, one must be able to use it. Throughout modern civilization, man has striven to realize the ideal of freedom as fully as possible, but always remains mismatch between "I want" and "I can".
The question of the freedom of the individual in the history of philosophy was considered from different positions, for example:
but) position of determinism(causation), whose representatives believe that in any situation choice there is only one a real possibility, and the rest of the possibilities are only formal. The extreme manifestation of determinism is fatalism(from lat. fatalis - fatal, fatum - fate, fate) - this is a worldview that denies the free will of a person and does not recognize anything accidental. According to this view, all events and actions of people predetermined by some external force with a common name fate, rock(or an inexorable combination of circumstances);
b) position of indeterminism- it is the complete opposite of determinism, its alternative. Representatives of indeterminism deny the causality of the phenomena of the world and believe that a person has no destiny, but there are many possibilities and he is completely free to choose one of them, without any coercion from outside. The extreme form of indeterminism is voluntarism(from Latin voluntas - will) - a direction in philosophy that considers will as the highest principle of being. Its representatives believe that “will rules” in the world, i.e. the viability of an individual or community depends solely on willpower, and not from other qualities;
in) position of alternativeism(from lat. alter - another), recognizing that in each choice there are necessarily at least two real possibilities. A person is not free to choose the objective conditions of his activity - this choice is also limited, but he is free to set himself the goal of action, more or less free to choose the means for realizing these goals. Freedom is always relative, because it can be limited. It is limited by life itself, its spatio-temporal framework, the possibilities of choice, the laws of the state, the freedom of other individuals. And, finally, freedom is limited by responsibility for one's choice of actions and their consequences to other people. Responsibility is a historically specific type of relationship between an individual, family, team, society, which is the conscious fulfillment by them mutual demands. If necessity (“must”) is primarily an external restriction of freedom, then responsibility is internal characteristic. How the rights a person is connected with his duties, and freedom person is related to his responsibility. The hero of the story by Antoine de Saint Exupery " Little Prince"says:" We are responsible for those whom we have tamed", "To be human means to feel that you are responsible for everything."
Whom they talk about responsibility, they mean responsibility not only to other people, society, but also internal responsibility of a person to himself, before the "project" of his life, which a person considers necessary to implement. Many things open up for young people. life paths, and the difficult problem of choosing one option arises. No matter how a person is subject to the influence of circumstances, friends, relatives, means mass media, in the end, he himself determines his path in life and carries full responsibility for your choice. And the more freedom that a person has, the more responsibility for the specific choice that he makes: “To whom much is given, from that it will be exacted” (from a Russian proverb).
At modern man quite often there is a separate understanding of freedom without its connection with responsibility. And the freedom of the individual is replaced by the freedom of instinct when the cult of the naked body is promoted, the legalization of obscenities, pornography, drugs, prostitution, etc. But history shows that more space in the life of an individual instinct, the less time and space remains for reasonable activity. A person becomes a toy of his own instincts, forgetting about his main difference from an animal - be a reasonable person.
Unwillingness to be responsible for the consequences of their activities, to fulfill their duty before previous and subsequent generations, it is sometimes clothed in such a fashionable phrase: "I owe nothing to anyone." This person is like disclaims responsibility for everything that happens, but thereby isolates itself from society, falling out of the social whole, which provided him freedom. That's why responsibility implies that a person has a sense of duty and conscience, the ability to exercise self-control and self-government. Conscience acts as the controller of all human actions. Man made choice decision means that the person ready to take full responsibility and even for what he could not foresee. The inevitability of the risk of doing something “wrong” and “wrong” implies that a person has courage necessary at all stages of its activity: both when making a decision, and in the process of its implementation, and, especially, in case of failure.
Currently, the pinnacle of ethical thought is ethics of responsibility, many philosophical schools are working on it. This is due to the fact that modern society many risks threatening life on the planet. Momentary benefits are incompatible with the principle of responsibility.
In one of the previous posts, we discussed perhaps the central concept in data analysis and hypothesis testing - the p-significance level. If we do not use the Bayesian approach, then it is the p-value that we use to decide whether we have enough reasons to reject the null hypothesis of our study, i.e. proud to tell the world that we had statistically significant differences.
However, in most statistical tests used to test hypotheses (for example, t-test, regression analysis, analysis of variance), next to the p-value there is always an indicator such as the number of degrees of freedom, aka degrees of freedom or simply abbreviated df, we'll talk today.
Degrees of freedom, what are we talking about?
In my opinion, the concept of degrees of freedom in statistics is remarkable in that it is also one of the most important in applied statistics (we need to know df to calculate the p-value in the voiced tests), but at the same time one of the most difficult to understand definitions for non-math students studying statistics.Let's look at an example of a small statistical study to understand why we need the df indicator, and what is the problem with it. Suppose we decide to test the hypothesis that average height Petersburg residents is equal to 170 centimeters. For these purposes, we recruited a sample of 16 people and obtained the following results: the average height for the sample was 173 with a standard deviation of 4. To test our hypothesis, we can use the one-sample Student's t-test, which allows us to assess how much the sample mean deviated from the expected mean in the general population in standard error units:

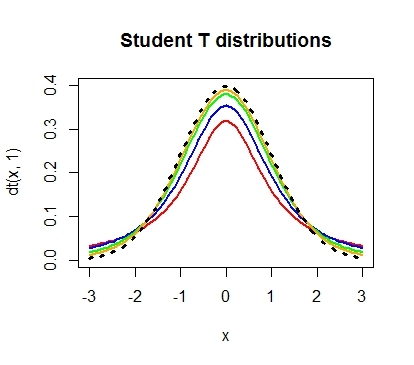
Let's spend necessary calculations and we get that the value of the t-criterion is 3, excellent, it remains to calculate the p-value and the problem is solved. However, having familiarized ourselves with the features of the t-distribution, we find out that its shape differs depending on the number of degrees of freedom calculated by the formula n-1, where n is the number of observations in the sample:
By itself, the formula for calculating df looks very friendly, we substituted the number of observations, subtracted one and the answer is ready: it remains to calculate the p-value, which in our case is 0.004.
But why n minus one?
When I encountered this procedure for the first time in my life at a lecture on statistics, I, like many students, had a legitimate question: why do we subtract one? Why don't we subtract two, for example? And why should we subtract anything from the number of observations in our sample at all?In the textbook, I read the following explanation, which I met more than once in the future as an answer to this question:
“Supposing we know what the sample mean is, then we need to know only n-1 elements of the sample in order to accurately determine what the remaining n element is.” Sounds reasonable, but such an explanation describes some mathematical technique rather than explains why we needed to use it when calculating the t-test. The next common explanation is as follows: the number of degrees of freedom is the difference between the number of observations and the number of estimated parameters. Using the one-sample t-test, we evaluated one parameter, the population mean, using n sample points, so df = n-1.
However, neither the first nor the second explanation helps to understand why exactly we needed to subtract the number of estimated parameters from the number of observations?
What about Pearson's Chi-squared distribution?
Let's move a little further in search of an answer. First, let's turn to the definition of the t-distribution, it is obvious that all the answers are hidden in it. So the random variable is:
Has a t-distribution with df = ν, provided that Z is a random variable with a standard normal distribution N(0; 1), V is a random variable with a Chi-square distribution, with ν the number of degrees of freedom, random variables Z and V are independent . This is already a serious step forward, it turns out that a random variable with a Chi-square distribution in the denominator of our formula is responsible for the number of degrees of freedom.
Let's then study the definition of the Chi-square distribution. The Chi-square distribution with k degrees of freedom is the distribution of the sum of squares of k independent standard normal random variables.
It seems that we are already quite there, at least now we know for sure that such a number of degrees of freedom in the Chi-squared distribution is simply the number of independent random variables with a normal standard distribution that we sum up. But it still remains unclear at what stage and why did we need to subtract one from this value?
Let's look at a small example that clearly illustrates this need. Let's say we really like to make important life decisions based on the outcome of a coin toss. But, Lately, we suspected our coin of having heads up too often. To try to reject the hypothesis that our coin is actually fair, we recorded the results of 100 tosses and got the following result: 60 times it came up heads and only 40 times it came up tails. Do we have enough reason to reject the hypothesis that the coin is fair? This is where Pearson's Chi-square distribution will help us. After all, if the coin were truly fair, then the expected, theoretical frequencies of heads and tails would be the same, that is, 50 and 50. It is easy to calculate how much the observed frequencies deviate from the expected ones. To do this, we calculate the distance Pearson's Chi-square using, I think, the formula familiar to most readers:

Where O are observed, E are expected frequencies.
The fact is that if the null hypothesis is true, then with repeated repetition of our experiment, the distribution of the difference between the observed and expected frequencies, divided by the root of the observed frequency, can be described using the normal standard distribution, and the sum of the squares k of such random normal variables will be by definition, a random variable that has a chi-square distribution.
Let's illustrate this thesis graphically, let's say we have two random, independent variables that have a standard normal distribution. Then their joint distribution will look like this:

In this case, the square of the distance from zero to each point will be a random variable that has a Chi-square distribution with two degrees of freedom. Remembering the Pythagorean theorem, it is easy to verify that this distance is the sum of the squares of the values of both quantities.
It's time to subtract one!
Well, now the climax of our story. Returning to our formula for calculating the Chi-square distance to check the fairness of the coin, we substitute the available data into the formula and we get that the Pearson Chi-square distance is 4. However, to determine the p-value, we need to know the number of degrees of freedom, because the form of the Chi-square distribution depends on this parameter, respectively, and critical value will also differ depending on this parameter.
Now the most interesting. Suppose we decide to repeat 100 tosses many times, and each time we record the observed frequencies of heads and tails, calculate the required indicators (the difference between the observed and expected frequencies, divided by the root of the expected frequency) and, as in the previous example, plot them on the graph.

It is easy to see that now all points line up in one line. The thing is that in the case of a coin, our terms are not independent, knowing the total number of tosses and the number of tails, we can always accurately determine the number of heads that fell out and vice versa, so we cannot say that our two terms are two independent random quantities. You can also make sure that all points will indeed always lie on the same straight line: if we got 30 heads, then there were 70 tails, if there were 70 heads, then 30 tails, etc. So even though we had two terms in our formula, we will use a Chi-square distribution with one degree of freedom to calculate the p-value! Here we finally got to the point where we needed to subtract one. If we were to test the hypothesis that our dice with six edges is fair, then we would use a Chi-square distribution with 5 degrees of freedom. After all, knowing the total number of throws and the observed frequency of falling out of any five faces, we can always determine exactly what the number of falling out of the sixth face equals.
Everything falls into place
Now, armed with this knowledge, let's return to the t-test:
The denominator is the standard error, which is the sample standard deviation divided by the root of the sample size. The calculation of the standard deviation includes the sum of the squared deviations of the observed values from their mean value - that is, the sum of several random positive values. And we already know that the sum of squares of n random variables can be described using the chi-square distribution. However, despite the fact that we have n terms, this distribution will have n-1 degrees of freedom, since knowing the sample mean and n-1 sample elements, we can always accurately specify the last element (hence this explanation about the mean and n-1 elements needed to uniquely determine the n element)! It turns out that in the denominator of the t-statistic we have hidden a chi-square distribution with n-1 degrees of freedom, which is used to describe the distribution of the sample standard deviation! So the degrees of freedom in the t-distribution are actually taken from the chi-squared distribution that is hidden in the t-statistic formula. By the way, it is important to note that all the above reasoning is valid if the trait under study has a normal distribution in the general population (or the sample size is large enough), and if we really had a goal to test the hypothesis about the average value of growth in the population, perhaps we would it is more reasonable to use a non-parametric criterion.
A similar logic for calculating the number of degrees of freedom is preserved when working with other tests, for example, in regression or variance analysis, it's all about the random variables with the Chi-squared distribution that are present in the formulas for calculating the corresponding criteria.
Thus, in order to correctly interpret the results of statistical studies and understand where all the indicators that we get when using even such a simple criterion as a one-sample t-test come from, any researcher needs to have a good understanding of what mathematical ideas underlie statistical methods.
Online Statistics Courses: Explaining Complex Topics in Simple Language
Based on the experience of teaching statistics in , we had the idea to create a series online courses dedicated to data analysis, in which the most important topics will be explained in an accessible form for everyone, the understanding of which is necessary for the confident use of statistical methods in solving various kinds a task. In 2015, we launched the Fundamentals of Statistics course, which to date has over 17,000 enrollees, 3,000 students have already received a certificate of successful completion, and the course itself was awarded the EdCrunch Awards and recognized as the best technical course. This year, on the stepik.org platform, the continuation of the Basics of Statistics course has started. Part two, in which we continue our acquaintance with the basic methods of statistics and analyze the most difficult theoretical issues. By the way, one of the main topics of the course is the role of Pearson's Chi-squared distribution in testing statistical hypotheses. So if you still have questions about why we subtract one from the total number of observations, we are waiting for you on the course!It is also worth noting that theoretical knowledge in the field of statistics will definitely be useful not only for those who use statistics for academic purposes, but also for those who use data analysis in applied areas. Basic knowledge in the field of statistics is simply necessary to master more complex methods and approaches that are used in the field of machine learning and data mining. Thus, the successful completion of our courses on introductory statistics is a good start in the field of data analysis. Well, if you are seriously thinking about acquiring data skills, we think you may be interested in our online data analysis program, which we wrote about in more detail. The mentioned courses in statistics are part of this program and will allow you to smoothly dive into the world of statistics and machine learning. However, these courses can be taken without deadlines by anyone outside the context of a data analysis program.
Tags: Add tags

